Appearance
Depth Anything V2 — Windowsローカル静止画深度推定
Depth Anything V2 — Windowsローカル静止画深度推定
Depth Anything V2 は、単眼深度推定向けのモデルとして検証されました。公式リポジトリは DepthAnything/Depth-Anything-V2 です。
セットアップ手順
モデル重みを読み込む前に、配布元とライセンスを確認してください。
bash
git clone https://github.com/DepthAnything/Depth-Anything-V2.git
cd Depth-Anything-V2
pip install -r requirements.txt学習済みモデルは、リポジトリ直下に checkpoints フォルダを作成し、その中に配置します。
モデル指定
Depth Anything V2のコード例では、モデルサイズごとに encoder を切り替えます。
| モデル | encoder指定 |
|---|---|
| Small | vits |
| Base | vitb |
| Large | vitl |
| Giant | vitg |
最初の検証ではBaseモデルが使用されました。
Pythonコード上の基本処理
入力画像は cv2.imread() で読み込み、model.infer_image(raw_img) で深度推定を行います。コードコメント上では、戻り値は HxW raw depth map in numpy とされています。
画像出力コマンド
run_depth.py はエラーを出さないものの、検証時には画像出力まで確認できなかったため、実際の出力確認では公式の run.py を使用しています。
作業フォルダに inputs と outputs を作成し、inputs に推定対象画像を配置します。
Baseモデルでグレースケール深度画像を出す例です。
bash
python run.py --encoder vitb --img-path inputs --outdir outputs/vitb/gray --pred-only --grayscale--encoder vitb と outputs/vitb/gray は、使用するモデルに合わせて変更します。
CUDA / xFormers / Tritonまわりの注意点
Depth Anything V2のWindowsローカル検証では、CUDA・xFormers・Triton関連で複数の問題が発生しました。
| 発生した事象 | 内容 | 対応 |
|---|---|---|
xFormers not available | 初回実行時に表示 | xFormers導入を試行 |
| torch不整合 | xFormers導入時にtorchが2.6.0へ上がり、torchaudio 2.5.1 / torchvision 0.20.1と不整合 | torch 2.5.1系へ戻す |
| 長いパスエラー | Windowsの長いパスが無効で一時ファイルパスが長すぎた | LongPathsEnabled を有効化 |
| CUDA未対応エラー | xFormers導入後、CUDAが動いていない旨のエラー | CUDA / PyTorch / xFormersの対応版を再構成 |
| Triton警告 | A matching Triton is not available, some optimizations will not be enabled | Windows対応ビルドの利用を検討。配布元の信頼性確認が必要 |
Windowsの長いパス対応は、管理者権限のPowerShellで以下を実行して有効化しました。
powershell
Set-ItemProperty -Path "HKLM:\SYSTEM\CurrentControlSet\Control\FileSystem" -Name "LongPathsEnabled" -Value 1確認コマンドです。
powershell
Get-ItemProperty -Path "HKLM:\SYSTEM\CurrentControlSet\Control\FileSystem" -Name "LongPathsEnabled"xFormers 0.0.28は、通常のインストールでtorchが見つからないエラーが出たため、以下でインストールに成功しています。
bash
pip install --no-build-isolation xformers==0.0.28CUDA 12.6ではTritonの対応問題が残ったため、最終的にCUDA 12.4へ落として検証されました。CUDA 12.4対応のPyTorchは以下で導入しています。
bash
pip install torch==2.5.1 torchvision==0.20.1 torchaudio==2.5.1 --index-url https://download.pytorch.org/whl/cu124CUDA 12.4対応のxFormersは以下です。
bash
pip3 install -U xformers --index-url https://download.pytorch.org/whl/cu124Windows用Tritonは公式サポート状況に注意が必要です。非公式ビルドを利用する場合は、配布元、ハッシュ、依存関係を確認したうえで、検証用環境に限定してください。
Depth Anything V2のLKGレビュー
Depth Anything V2は、LKG表示に対して有用な候補として検証されています。
レビューでは、全体的に立体感は付きやすくなった一方で、細部の奥行き品質には調整余地があるとされています。
| 観点 | 記録された評価 |
|---|---|
| 網部分 | 他モデルと同様に苦手で、細部構造が崩れやすい |
| Hugging Face版との比較 | ローカルBaseモデルの方が網部分の破綻がやや少ない |
| ハト画像 | 被写体にフォーカスを当てた場合、Hugging Face版との差は大きくなかった |
| 奥側フォーカス | ローカルBaseモデルの方がやや立体感がある |
| 額・胸・頭・顔 | 額や胸の遠近感、頭の丸み、顔の立体感の解像度が良い |
| 手の部分 | 奥行きの変化が間延びして見える例がある |

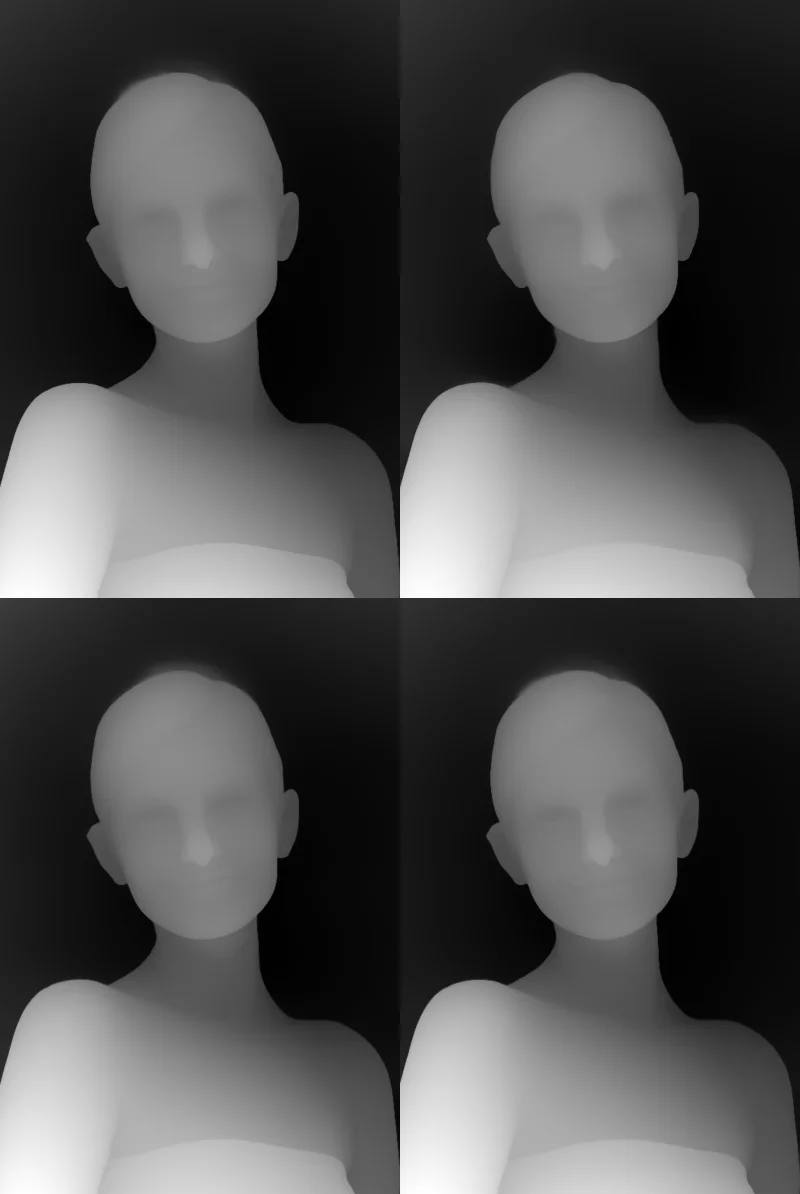
Small / Base / Large 比較
モデル比較では、モデルサイズが大きくなるにつれて処理時間が長くなりました。ただし、処理時間はスマートフォンのストップウォッチによる手計測で、GPU、VRAM、入力解像度、正確な実行条件が記録されていません。以下は厳密なベンチマークではなく、参考値です。
| モデル | 参考処理時間 | 計測条件 | レビュー |
|---|---|---|---|
| Small | 3.4秒 | 単一静止画。入力解像度、GPU、VRAMは記録なし | バスケ写真では網の表現がSmallの方がきれいに見える例があった |
| Base | 3.8秒 | 単一静止画。入力解像度、GPU、VRAMは記録なし | 初期検証で使用 |
| Large | 7.4秒 | 単一静止画。入力解像度、GPU、VRAMは記録なし | Smallよりきれいな場合が多い。ただし人物では顔の凹凸が強調されすぎる可能性がある |
モデル間の差は画像によって異なり、強い立体感を優先するか、自然な見え方を優先するかで選定が変わります。
← ローカル深度推定 Windows — Depth Anything V2 / Video Depth Anything / Apple Depth Pro / MoGe 検証ガイド 概要に戻る