Appearance
holo2作業記録
Holographic Remoting の再生モードを使用してアプリをプレビューおよびデバッグする - Mixed Reality
MRTK2-Unity 開発者向けドキュメント - MRTK 2
mrtkの勉強から入る。
基本ui要素の配置など。
つかうmrtkはver3。
準備
指示内容↓
・GitからMRInspectionをクローン
・MRTK3セットアップ(3から)
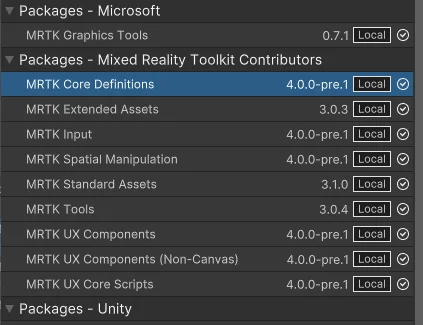
※今回いれるMRTK3の項目は以下の項目にチェック
MRTK Core Definitions
MRTK Input
MRTK UX Core Scripts
MRTK UX Components
MRTK UX Components (Non-Canvas)
MRTK Spatial Manipulation
MRTK Graphics Tools
MRTK Extended Assets
MRTK Tools
補足
公式ドキュメント
gitからクローンするときに、どこからunityに持っていっていいかわからずに手間取った。
普通に空のファイルにクローンして、それをunityhubから追加してやれば良かった。
先にプロジェクト作ってgitからクローンしてmrtkを作ってたプロジェクトに入れるという意味のない工程を一度挟んでしまった。
正解は、gitからプロジェクトをクローンして、それをunityhubに追加して、そこにmrtkをインポートだった。
MRTKは、MixedRealityFeatureToolからいれる。
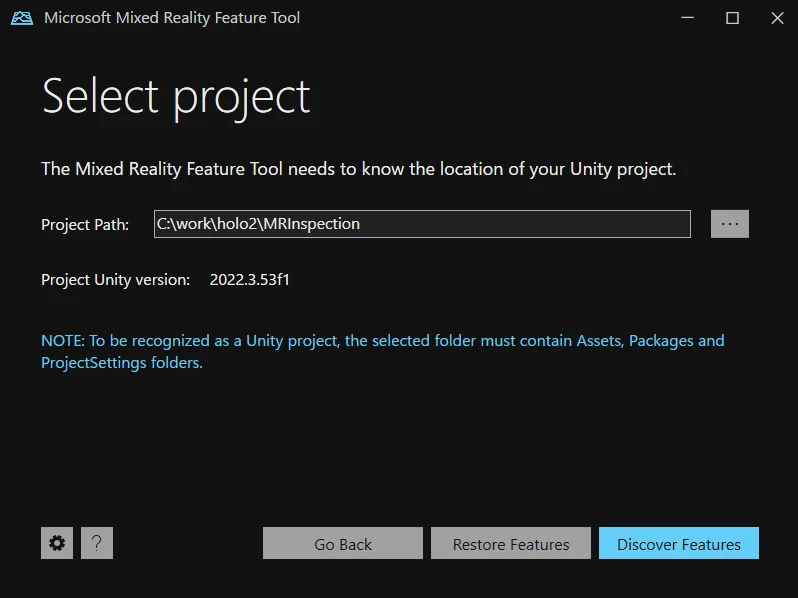
ここでunityのプロジェクトフォルダを選択してあげる。
このとき開かれるフォルダ選択画面の、フォルダー名のところには初期から_が入力されているが、これを消すと何も入れれなくなるので消しちゃだめ。
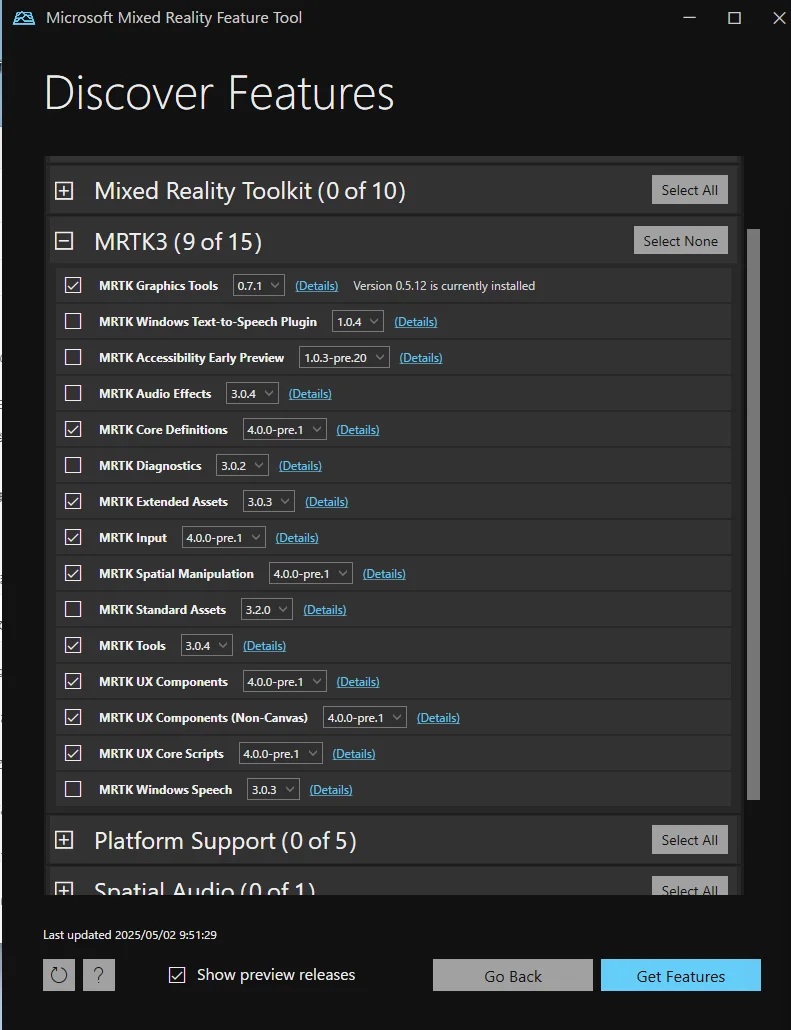
これでいれるコンポーネントを選択する。
その後はそれっぽいボタンを押していくとインポートできる。
環境構築
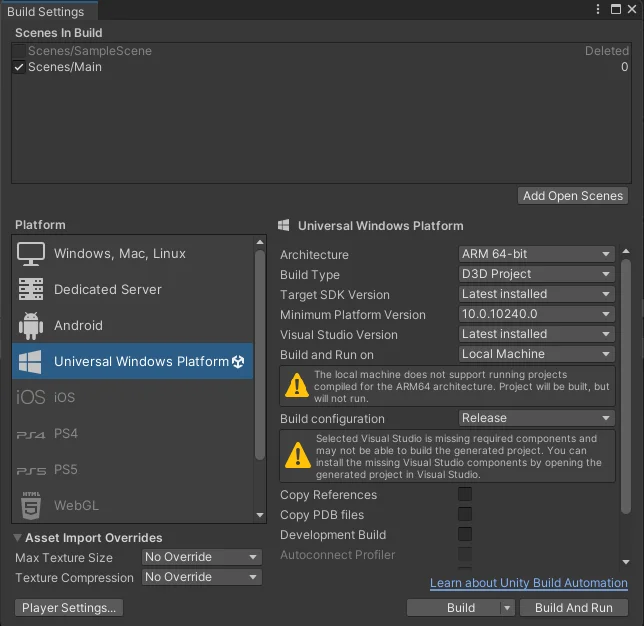
ビルドセッティングはこう。
プロジェクトセッティングスも色々設定する。
主にplayerのところを弄りました。
色々して環境確認のためにビルドしてみました。
そしたら以下のようにエラーが出ました。
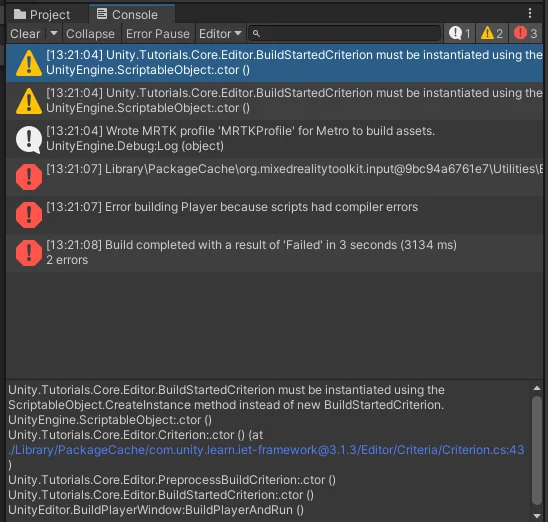
パッケージの参照エラーみたいです。
今入ってるパッケージはこれ。
ビルドするとエラーが即消えてしまって困っていたのですが、ここから変えることができました。
unityのエディタを再インストールして、すべてやり直したら行けました。
AndroidのSDKエラーも
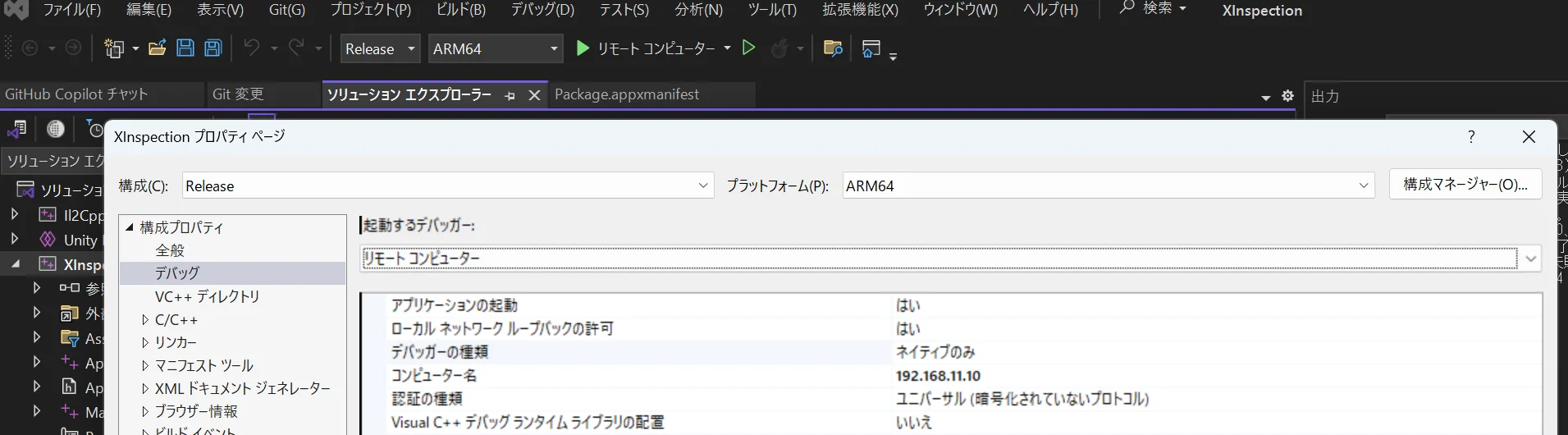
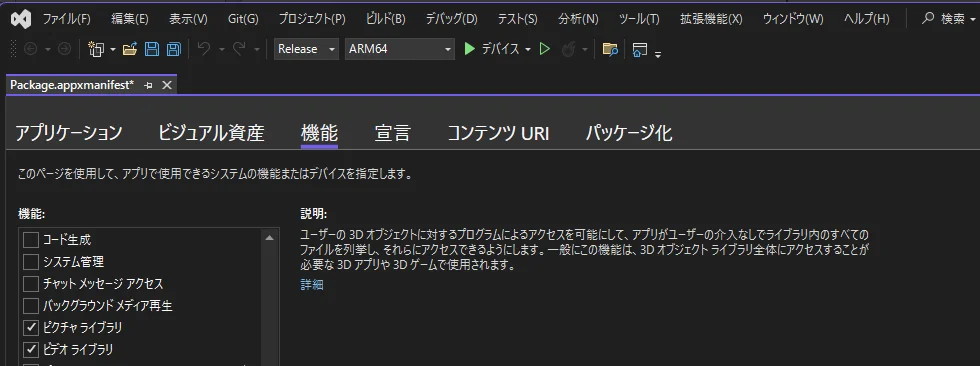
ビルドは、ソリューションファイルから行う。
↓ビルドの際の設定。releaseでARM64
ビルドもうまく行かなかった。
結局↓の設定をしてリモートコンピュータ扱いでビルドすることになった。
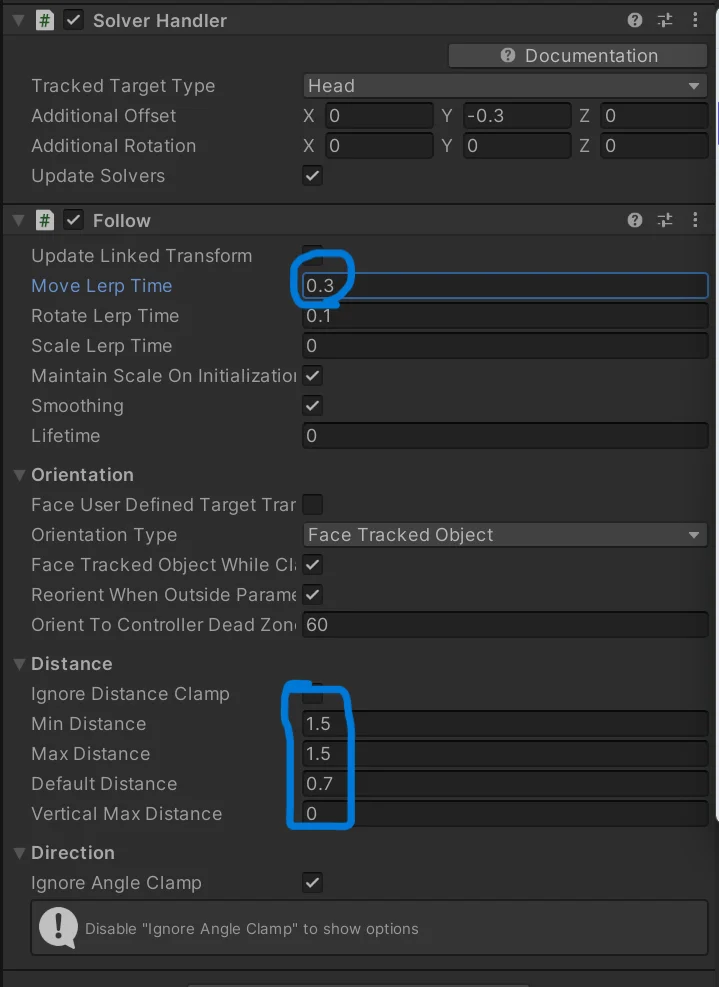
followの項目について分かったこと
SolverHandlerで位置の変更ができます。 Follow>Direction>IgnoreAngleClampで視点に対してウィンドウの固定ができます! あとこれは補足ですが、 Follow>Distance>Min/MaxDistanceの値をイコールにすることで視点に対してウィンドウが固定したようについてくるようになります
スムースについて follow>movelerptimeの数値が大きくなるとよりふんわりついてくるようになります。 0.7 ウィンドウの一部が必ず視界に入ってきながら追従 0.5 ウィンドウの半分は必ず視界に入ってきながら追従する 0.3 ウィンドウのほぼ全体が必ず視界に入ってきながら追従する 0.1 ほぼ固定 という感じでした。
holographicremotingのやり方について
MRTK3のインポートだけではできない。
↑の状態だと、mixedrealityの項目の中にMRTK3しか表示されない。
Package Manager の "Add package from git URL..." で以下を入力
com.microsoft.mixedreality.openxrこいつを入れると、
こんな感じで出てくるようになる。
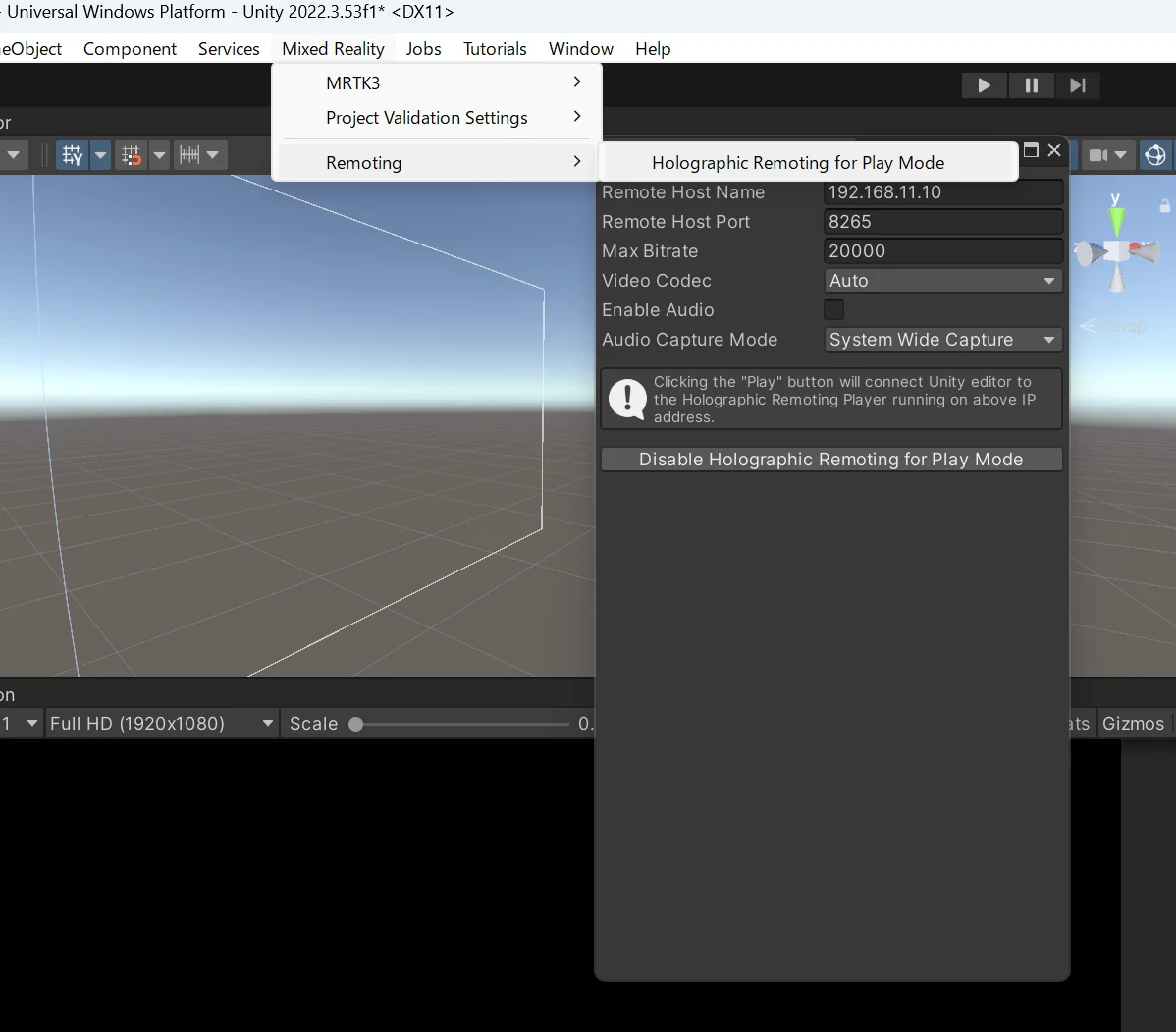
remotehostnameの入力だけすればよくて、
この数値はhololens2からholoremotingをひらくと、画面下部に
waiting for connection on
数字.数字.数字.数字
gethelpat url~~~
って書いてあるので、この数字数字数字数字ってところを入力してあげればいけます。
この後、unity側のwindowにabletohogehogeみたいなボタンを押して、fixボタンがあればfixボタンを押してあげて、playすればhololens上でのデバッグができるようになります。
ダイアログの距離について
遠すぎる設定にすると、ボタンが触れなくなります。視野角をとるために小さくしたければ、画面の距離ではなく、transformScaleをいじったほうがいいです。
画面製作指示内容
○編集ルート選択画面 ・タイトル「ルート編集」 ・×ボタン:右上に設置で管理者画面に戻る用 ・点検種別:メイン画面と同じ項目 ・点検対象:〃 ・ルート作成ボタン:メイン画面同様に点検種別・点検対象が選ばれていない場合は作成ボタンが押せない
○ルート編集時サブ画面 ・タイトル「オプション」 ・×ボタン:右上に設置で編集ルート選択画面に戻る用 ・ルート登録ボタン:引いたルートを登録する(CSVファイルにルート座標を記録) ・ルート引き直しボタン:現在引かれているルートをすべて削除(この処理でCSVの情報は消えない) (+目の前にラインを引くオブジェクトを表示?)
★画面の形はメインと同じような形、色でOK ★まずは2つの画面、ボタンだけ作る ★ルート編集画面はルート引くことがメインなので、画面の表示、非表示ができるとよい →よくあるのは手を見ることでボタンを表示 → ボタンで表示、非表示の選択を行う
井上さんからルートを引くためのプレハブをいただいた。
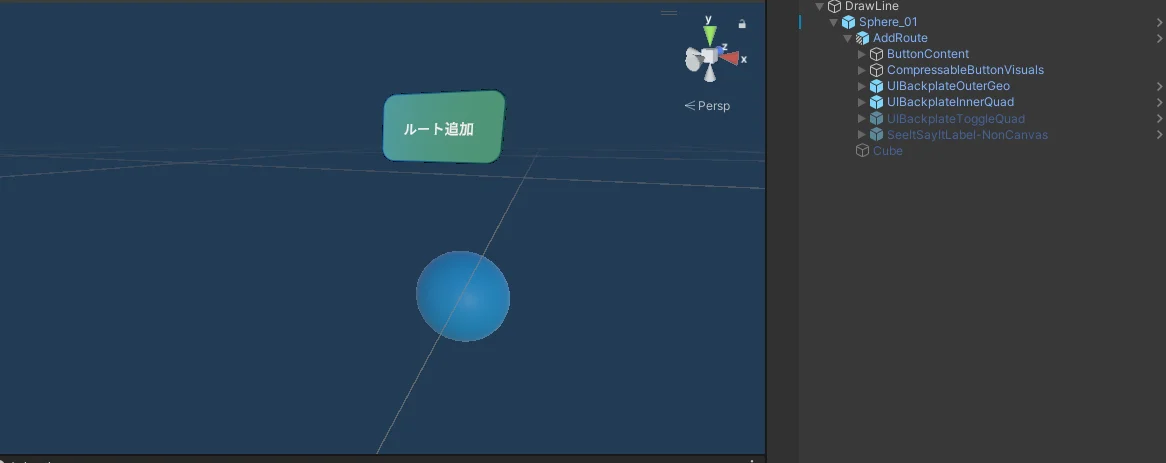
↑このように、スフィアの子オブジェクトとしてボタンを置いた。
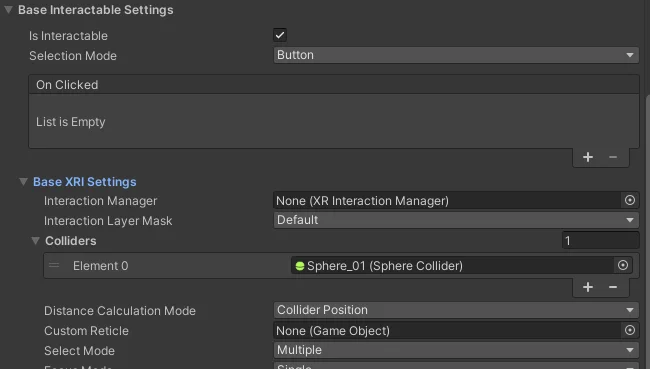
すると、スフィアに着けているオブジェクトマニピュレータがボタンのあたり判定を阻害してしまい、ボタンを押せなくなってしまった。
調べると、オブジェクトマニピュレータ内の項目に、つかみ判定のためのあたり判定のコライダーを指定できるフィールドがあった。
ここにスフィア自体のコライダーをアタッチすることで、正確につかみ判定を設定できた。
5/21指示内容
今回のタスクだとインキから資料が来たタイミングで、ピクトグラムのイメージを集めてほしいかな → おそらく、1項目につき2,3個候補があったらよいかなと注意・警報系をまとめて持ってきても良いとおもう。
それまでの間は、話に上がった屋外でも見やすいカラーの調査お願いしたいです。 軽くデバイス調査(多分合うやつはないので無理やりしかないかも)はこちらでも引き続きやるけど基本後回し
Author: 松崎 | Source:
松崎\holo2作業記録 1e5aba435ee7802f9c08e198a12ca76a.md